
👋 Hello there, I’m Sayan!
I am a fourth-year PhD student at New York University working under the supervision of Prof. Zhong-Ping Jiang. I obtained my MS in Systems and Control Engineering from the Indian Institute of Technology Hyderabad, India and my BE in Electrical Engineering from the National Institute of Technology Silchar, India.
 🔬 My research interests lie at the intersection of control theory, reinforcement learning, cybersecurity and safe autonomy. More about my research works are presented below.
🔬 My research interests lie at the intersection of control theory, reinforcement learning, cybersecurity and safe autonomy. More about my research works are presented below.
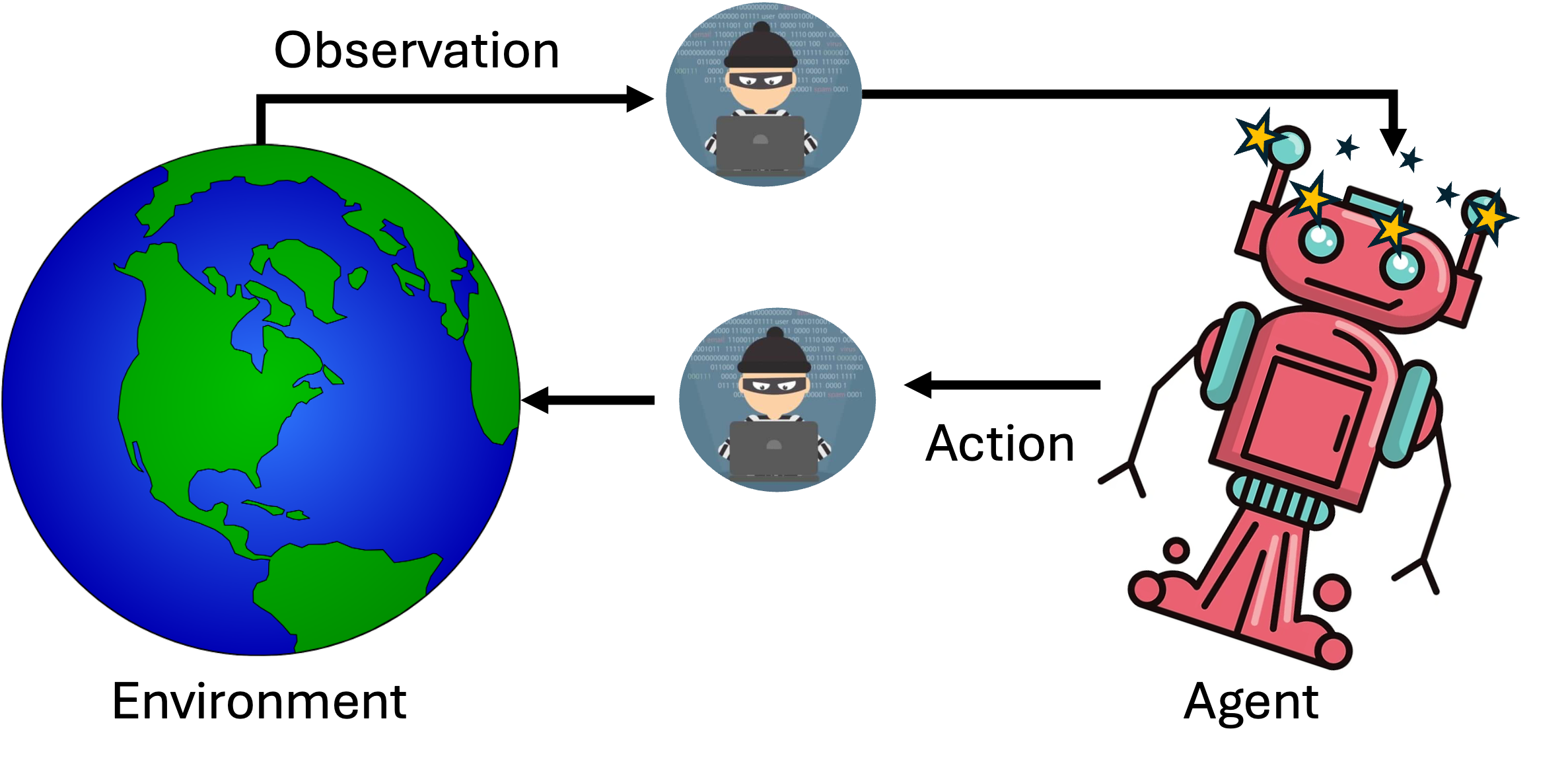
Resilient RL under Adversarial Conditions
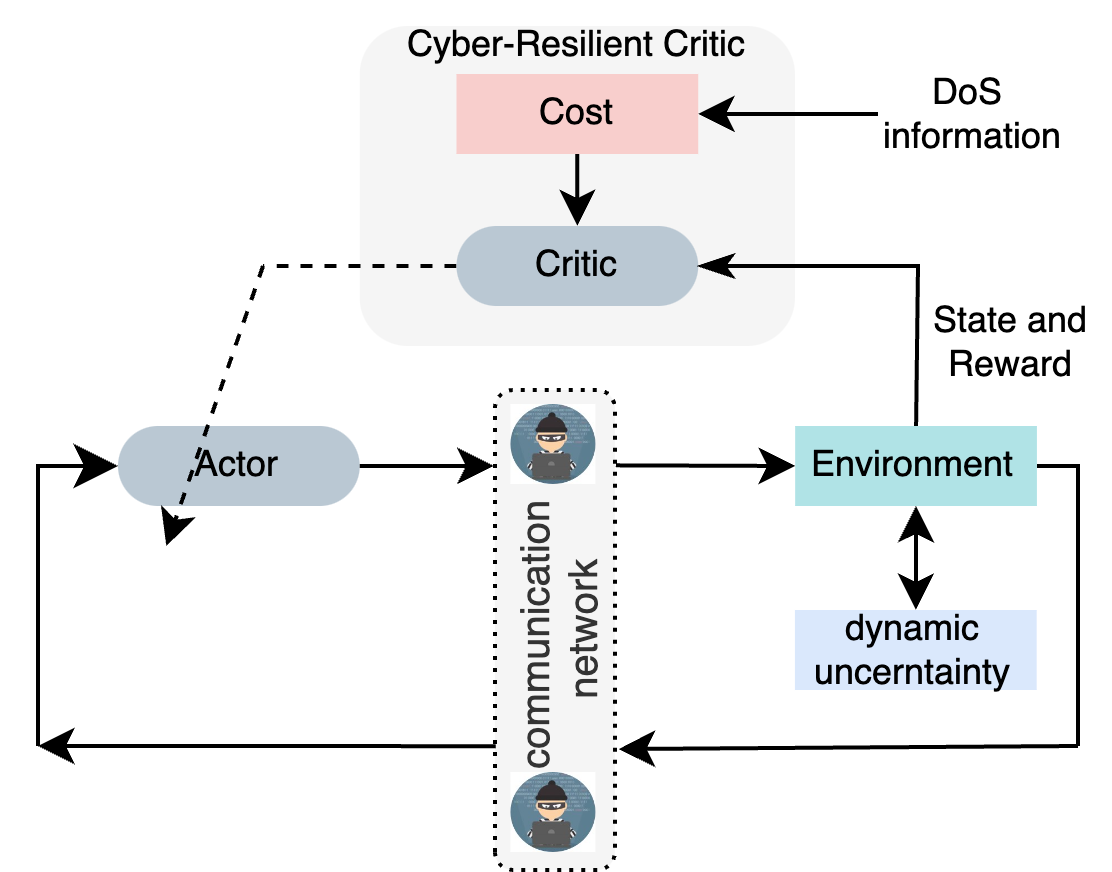
I work on data-driven techniques that help keep systems safe and reliable during cyber attacks, all without requiring comprehensive system models. By combining advanced reinforcement learning and control theoretic tools, my approach ensures long-term, stable performance in systems that evolve in either partially known or constantly changing environments. I also develop adaptive learning-based control strategies that quickly adapt to shifting attack patterns and use real-time data to identify critical DoS attack bounds, safeguarding closed-loop performance under adversarial conditions. Ultimately, my goal is to offer robust, cyber-resilient solutions that keep modern systems secure in an ever-evolving digital landscape.
Safe & Resilient Autonomous Driving Solutions
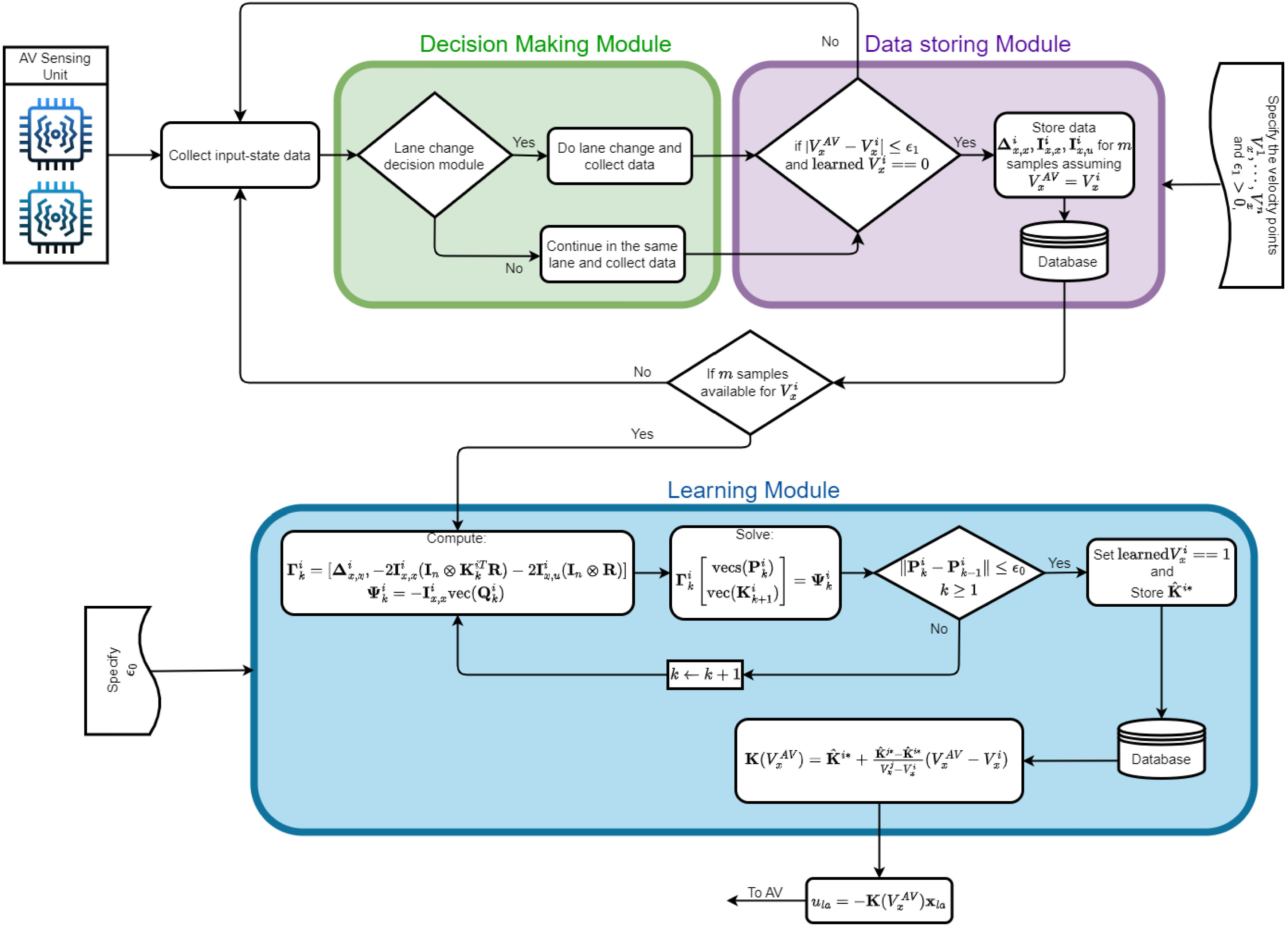
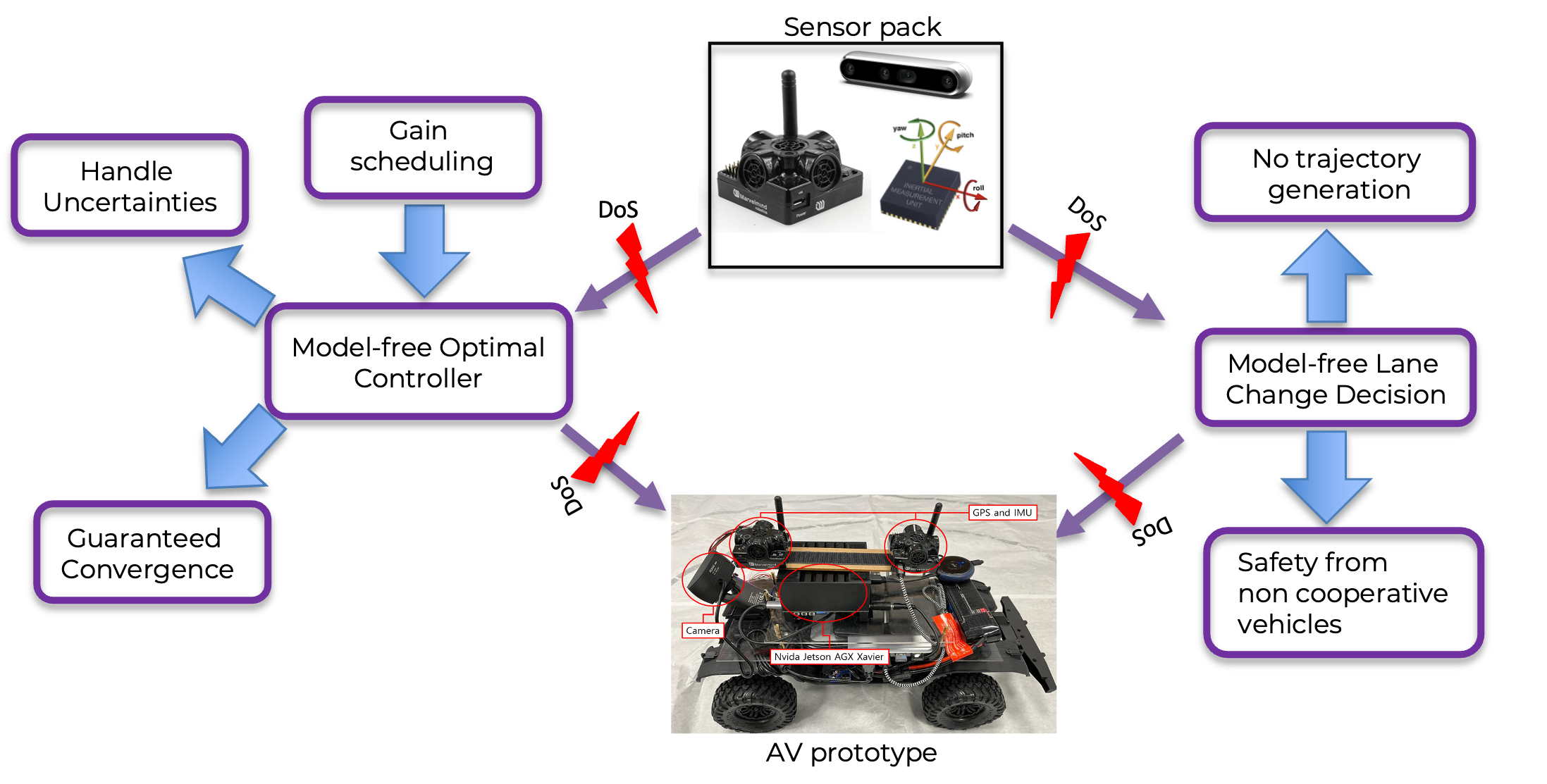
I focus on making autonomous driving safer and more adaptable by designing real-time lane-changing controllers that don’t rely on perfect system models. By merging adaptive dynamic programming with sensor fusion techniques—using GPS, IMU, and camera data processed on an Nvidia Jetson AGX—I ensure that vehicles can make quick, reliable decisions under fast-changing conditions. My work also includes robust safety features like lane abortion and resilience to cyber threats, such as DoS attacks, helping maintain stability even when networks are disrupted. Through both high-fidelity simulations and hands-on RC car tests, I demonstrate rapid learning and practical performance, bringing autonomous driving research closer to real-world roadways.
3D Safe Motion Planning for Autonomous Driving
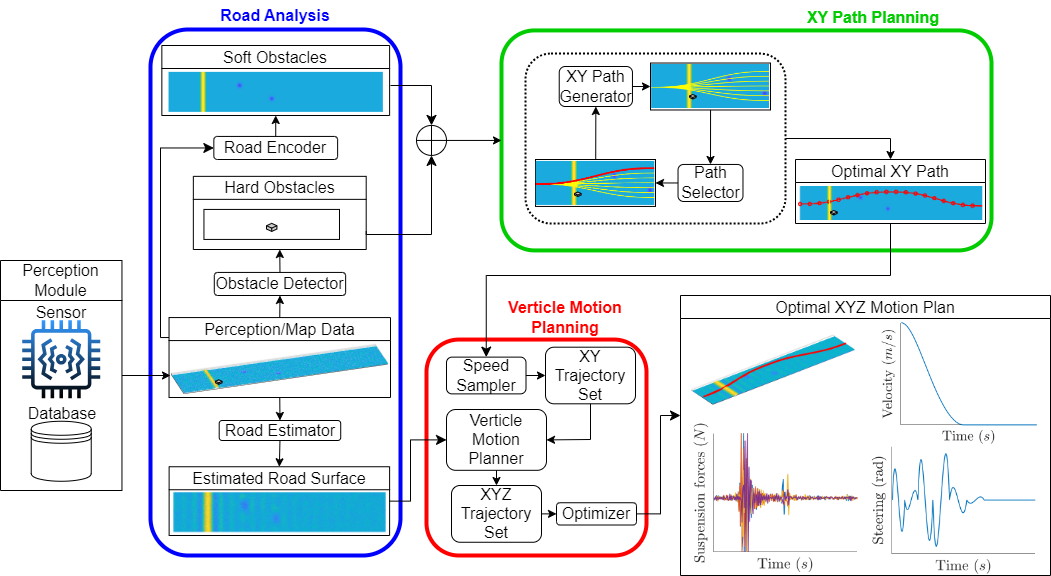
I focus on advanced motion planning that incorporates an entire vehicle model, including active suspension and uses real-time perception data for more precise, comfortable driving. By combining a two-phase nonlinear optimization process—first generating a reliable XY path based on road events and then refining it into a full XYZ trajectory—I can optimize speed, vertical movement, and overall stability. This approach has been extensively validated with both synthetic and real-world data, underscoring its practical effectiveness in dynamic driving scenarios.